
450-million-year-old organism finds new life in Softbotics
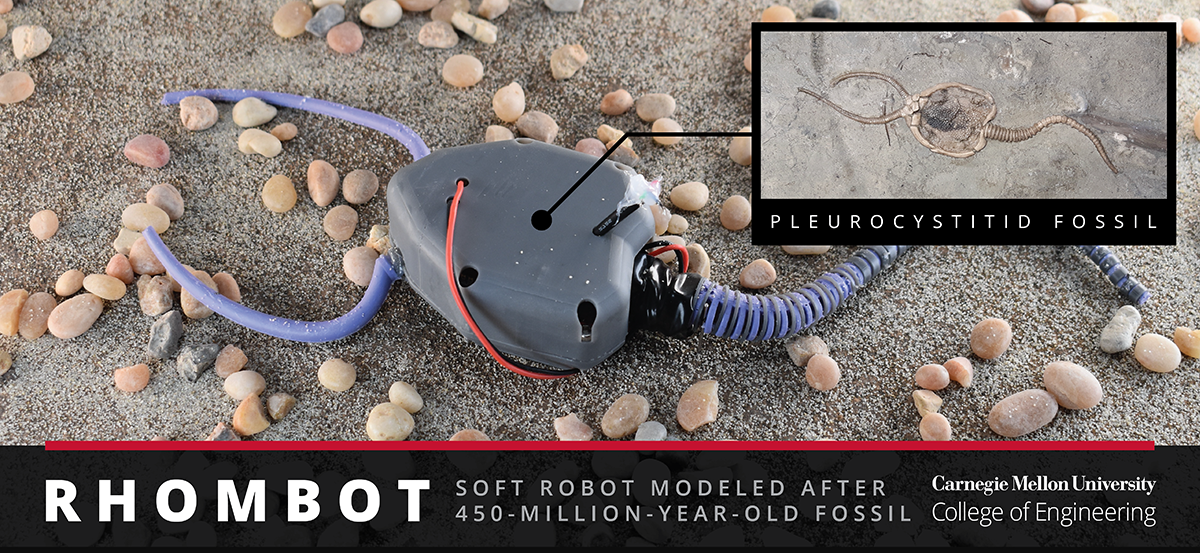
Researchers in the Department of Mechanical Engineering used fossil evidence to engineer a soft robotic replica of pleurocystitids, a marine organism that existed nearly 450 million years ago and is believed to be one of the first echinoderms capable of movement using a muscular stem.
Humans have been walking the earth for roughly 300,000 years, an unfathomable period of time that in the grand scheme of Earth’s history is relatively recent. In fact, our time on earth represents only 0.007% of the planet’s history. Therefore, the modern-day animal kingdom that influences our understanding of evolution and inspires today’s mechanical systems is just a fraction of all creatures that have existed through history.
To broaden our perspective of animal design and movement, researchers in Carnegie Mellon University’s Department of Mechanical Engineering, in collaboration with paleontologists from Spain and Poland, are introducing Paleobionics—a field aimed at using Softbotics, robotics with flexible electronics and soft materials, to understand the biomechanical factors that drove evolution using extinct organisms.
“Our goal is to use Softbotics to bring biological systems back to life, in the sense that we can mimic them to understand how they operated,” said Phil LeDuc, professor of mechanical engineering.
Using computational simulations and soft robots, a research team led by LeDuc and Carmel Majidi have given pleurocystitid, a marine organism that existed nearly 450 million years ago, new life. Pleurocystitid, a member of the echinoderm class, which includes modern day star fish and sea urchins, were one of the first echinoderms capable of movement using a muscular stem. Despite the absence of a current-day analogue, pleurocystitids have been of interest to paleontologists due to their pivotal role in echinoderm evolution.
“Softbotics is another approach to inform science using soft materials to construct flexible robot limbs and appendages. A lot of fundamental principles of biology and nature can only fully be explained if we look back at the evolutionary timeline of how animals evolved. We are building robot analogues to study how locomotion has changed,” explained Majidi, lead author and professor of mechanical engineering.
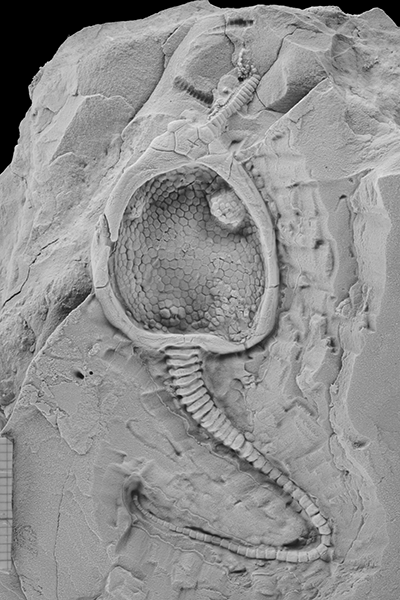
The team used fossil evidence to guide their design and a combination of 3D printed elements and polymers to mimic the flexible columnar structure of the moving appendage to build the robot. They demonstrated that pleurocystitids were likely able to move over the sea bottom with the aid of a stem that pushed the animal forward and determined that wide sweeping movements were likely the most effective motion. Increasing the length of the stem was also found to significantly increase the animals’ speed without forcing it to exert more energy.
“Researchers in the bio-inspired robotics community need to pick and choose important features worth adopting from organisms over time,” said Richard Desatnik, Ph.D. candidate and co-first author.
“Essentially, we have to decide on good locomotion strategies to get our robots moving. For example, would a starfish robot really need to use 5 limbs for locomotion or can we find a better strategy?” added Zach Patterson, CMU alumnus and co-first author.
One of the biggest remaining questions about pleurocystitids are how the type of surface they lived on affected how they moved, be that sand or mud. Now that the team has demonstrated that they can use Softbotics to engineer extinct organisms, they hope to explore other animals, like the first organism that could travel from sea to land—something that can’t be studied in the same way using conventional robot hardware.
We aren’t just looking at fossils in the ground; we are trying to better understand life through working with amazing paleontologists.
Phil LeDuc, Professor, Mechanical Engineering
“Bringing a new life to something that existed nearly 500 million years ago is exciting in and of itself, but what really excites us about this breakthrough is how much we will be able to learn from it,” said LeDuc. “We aren’t just looking at fossils in the ground, we are trying to better understand life through working with amazing paleontologists.”