
So tricky, a robot can do it
Carnegie Mellon Researchers have taken inspiration from geckos to create a material that adheres to wet and dry surfaces, even on an incline.
When they aren’t selling insurance, geckos can be found climbing across anything from a dry desert floor to a cold mountain top without leaving any sticky residue behind. This unique ability is the inspiration for many wall crawling robots, but for the first time researchers at Carnegie Mellon University have introduced it to water.
“This is an amazing proof of concept,” said Sampada Acharya, a Ph.D. candidate in mechanical engineering. “We can imagine using a material like this not only for underwater exploration, but to help everyday people in healthcare too.”
We can imagine using a material like this not only for underwater exploration, but to help everyday people in healthcare too.
Sampada Acharya, Ph.D. candidate, Mechanical Engineering
Typically, fabricating adhesive patches requires complex procedures in a cleanroom. Using diffraction grating films, the team simplified the process in a cost-effective, fast, and facile way.
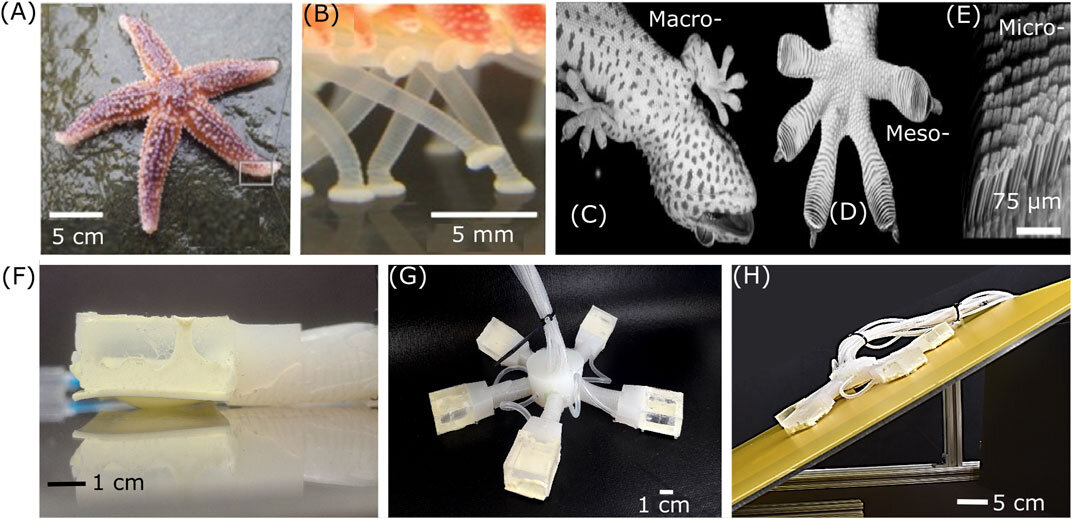
In order to test the material on something that could both climb and swim, the team developed a Gecko Adhesion Based Sea Star (GASS) Crawler robot.

When assessing the GASS crawler robot’s performance on glass, acrylic, and stainless-steel surfaces, they found that the adhesive feet significantly improved locomotion under both wet and dry conditions. It was able to climb on 25-degree slopes and hold on statically to 51-degree slopes.
Both Acharya and Peter Roberts, lead authors on the paper, are focused on improving healthcare practice, and although their goals are different, both have found this material a promising solution. Acharya’s research focuses on optimizing pathogen (e.g., bacteria, virus, fungi) collection from infectious environments to reduce hospital-acquired infections in patients by using gecko-inspired micro patterned materials that will be integrated with autonomous robots.
“I hope to see providers utilizing robots integrated with gecko-inspired smart materials to collect and detect pathogens on surfaces. This will reduce human error and can decrease hospital infections, reduce operational costs, and make patients' lives easier,” explained Acharya. “GASS crawler’s ability to move on all different surfaces brings us one step closer to that goal.”
Roberts, also a Ph.D. candidate in mechanical engineering, has been working to develop patches for biopotential signal acquisition (ECG, EMG, EEG). In order for these patches to work efficiently on skin, they need to adhere to it in spite of the presence of hair, sweat, and other contaminant particles.
“The use of micro patterned structures allows this material to adhere to different surfaces, and has shown good results on skin,” said Roberts. Adhesion is enhanced using a contact splitting effect that is similar to what is observed in natural gecko adhesives.”
This research evolved from a project in the Bioinspired Robot Design and Experimentation course taught by Victoria Webster-Wood, an associate professor of mechanical engineering.
The diverse applications extend from robotics to electronics and even energy devices.
Reeja Jayan, Associate Professor, Mechanical Engineering
“The key materials innovation here is the ability to pattern these microscale structures over large areas using diffraction grating arrays that you can order on Amazon,” said Reeja Jayan, an associate professor of mechanical engineering and Acharya’s advisor. “The diverse applications extend from robotics to electronics and even energy devices.”
Moving forward, the team hopes to make improvements to both the gecko-inspired adhesives, and the sea star crawler so that it can be submerged in water, climb to steeper slopes, and reach faster speeds.
Carmel Majidi, professor of mechanical engineering and advisor to Peter Roberts, was a collaborator on this work.