
Tailing new ideas
Aaron Johnson’s Robomechanics Lab is looking to nature for robotic tail designs that make orientation tasks easier for moving robots.
From lizards to kangaroos, many animals with tails possess an agility that allows them to turn or self-right after a foot slip. Cheetahs demonstrate tremendous precision and maneuverability at high speeds due, in part, to their tails. Translating this performance to robots would allow them to move more easily through natural terrain. However, adding a tail to a robot carries disadvantages like increased mass, high inertia, and a higher energy cost.
Researchers at Carnegie Mellon University’s Robomechanics Lab, in collaboration with the University of Cape Town, have found ways to overcome these challenges inspired by the cheetah’s tail. The findings were published in IEEE Transactions on Robotics.
The cheetah’s lightweight furry tail is known as an aerodynamic drag tail; that is, it acts sort of like a parachute. Most robotic tails have high inertia, but the cheetah manages to retain low inertia. Inertia is a physical quality that describes an object’s resistance to changes in motion—high tail inertia means the tail can apply high forces. Aerodynamic tails instead use a different principle—aerodynamic drag—to achieve high forces without a large inertia.
In nature, aerodynamic drag tails are often used in reorientation tasks, such as turning and recovering after a foot slip, so researchers believe an aerodynamic drag tail will help solve problems of robotic mobility. The researchers compare aerodynamic and inertial tails in their paper, eventually constructing a tail to maximize effectiveness while minimizing inertia.


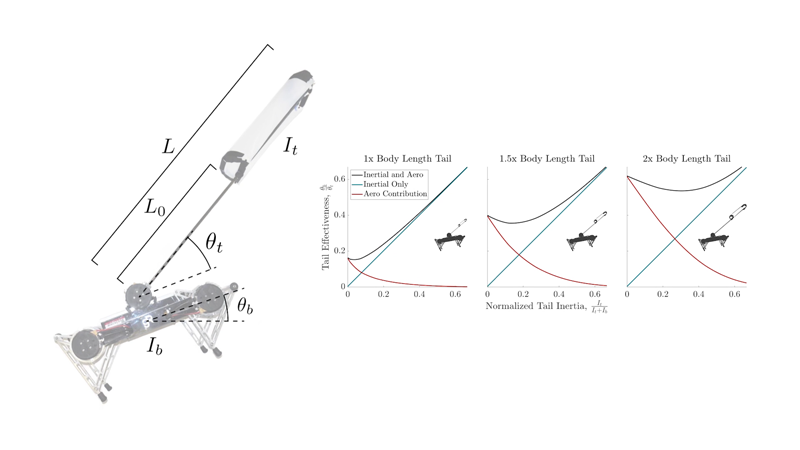
The researchers found that an aerodynamic tail can allow the robot to rotate in air as well as an inertial tail, but the aerodynamic tail is much lighter. They also found that the robot with a tail can accelerate faster than a robot without a tail, despite the increase in mass from the tail. This means the robot has better control over its movements like slowing down, speeding up, or turning.
“Robotic tails have historically relied on high inertia tails because of their simplicity, but nature has already figured out that there are better ways to stabilize agile motions,” said Joseph Norby, a Ph.D. student working with Aaron Johnson, an assistant professor of mechanical engineering. “This research suggests that following nature’s inspiration results in equally capable tails for a fraction of the weight cost.”
Ultimately, the research suggests that tails are effective for improving robot agility. They will be able to recover from foot slips and decrease damage during a fall. When robots move better, they are more effective.
We believe that improving robot agility will make our robots better at aiding people outside the lab.
Joseph Norby, Ph.D. student , Mechanical Engineering
“Tails help to stabilize the robot, which is critical when it is performing difficult maneuvers. We believe that improving robot agility will make our robots better at aiding people outside the lab,” said Norby.
Additional authors include former master’s students Jun Yang Li and Cameron Selby. The University of Cape Town’s Amir Patel collaborated on the project.
The work was sponsored in part by the National Science Foundation (NSF). Norby is also a fellow in NSF’s Graduate Research Fellowship Program.