
Under the sea
A team of researchers from Carnegie Mellon’s Soft Machines Lab has created a soft robot inspired by the quick and agile brittle star, the first mobile and untethered underwater crawling robot.
Soft robots are better suited to certain situations than traditional robots. When interacting with an environment, humans, or other living things, the inherent softness built into the structure of a robot made of rubber, for example, is safer than metal. Soft robots are also better at interacting with an unstable or uncertain environment—if a robot makes contact with an unpredicted object, it can simply deform to the object rather than crashing.
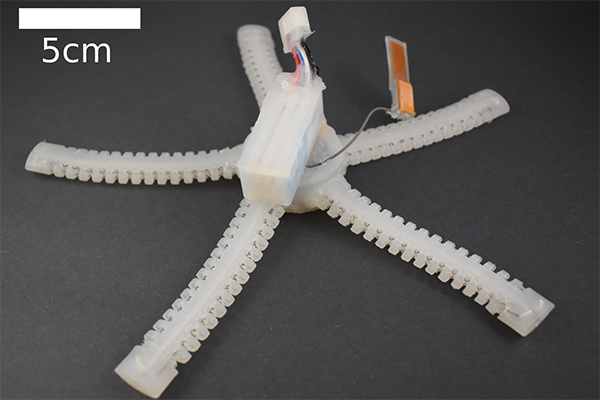
This deformability, characteristic of soft robots, flows directly into Zach Patterson’s work in the Soft Machines Lab led by Carmel Majidi, associate professor of mechanical engineering. A Ph.D. candidate in mechanical engineering, Patterson has created a soft robot inspired by the brittle star, a type of starfish that is relatively quick and agile. The robot, named PATRICK, is the first mobile and untethered underwater crawling soft robot.
“It’s a robot that crawls along the seabed, and part of the value of the platform is that the limbs are made of rubber,” said Patterson, who collaborated with Keene Chin, a Ph.D. candidate in robotics and Andrew Sabelhaus, a postdoctoral research associate in mechanical engineering. “It can easily deform to uncertainty in the environment.”
PATRICK’s limbs are made of beams of rubber with four embedded coiled wires made out of a metal called shape memory alloy (SMA), specifically a nickel-titanium composition. The alloy undergoes a phase change with a change in temperature; after it passes this temperature threshold where it undergoes the phase change, it morphs back into a remembered shape. At room temperature, the “not-remembered” phase, the alloy is very flexible, giving PATRICK’s limbs flexible and deformable properties. To make the robot move, the researchers hit it with electric current, causing the wires to heat up past its transition temperature and allowing the limbs to contract and move in different directions.
Patterson and his colleagues designed PATRICK with a few goals in mind. One goal, following a major thrust in the Soft Machines Lab, was to make an untethered robot—as in, a robot that is not connected to a wire leading to off-board power and electronics.
“We want to put the power and the electronics on-board with the robots; that was a core goal here,” said Patterson. “That’s a non-trivial step, and it changes the way you have to design and build the robot.”
Patterson also sought to develop an electronic and computational infrastructure for the robot, which is common in traditional robotics. In soft robotics, researchers are typically more focused on physical design and being able to demonstrate functionality, and do not build a mature computational infrastructure around the robot they have designed.
We want to put the power and the electronics on-board with the robots.
Zach Patterson, Ph.D. candidate, Mechanical Engineering
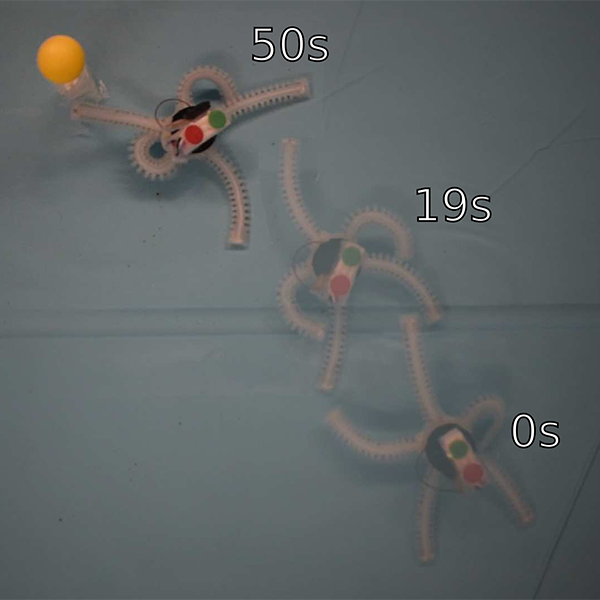
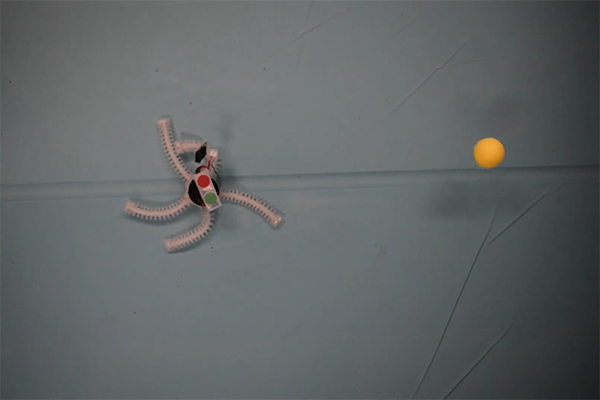
The researchers built a computational infrastructure for PATRICK using the Robotics Operating System (ROS), a computer software package for robotics development. With the system, the team can dictate different tasks for PATRICK to complete, such as moving underwater to reach a ball. There are few untethered soft robots, and even fewer ones that can crawl underwater, but Patterson considers the incorporation of this infrastructure to be the larger contribution of PATRICK within the field of soft robotics.
“This computational infrastructure allows us to do things like getting to a commanded point in space. This is unique, as far as we know, in the soft robotics literature,” he said. “We wanted to go beyond one-off demos or ad-hoc software and make a more flexible platform that we can use to test out different control and planning algorithms and different sensors.”
Patterson sees this research as a catalyst for a variety of additional research in the Soft Machines Lab, particularly to explore control theory and control algorithms in the soft robotics context. Regarding the future of PATRICK, Patterson hopes to use the bio-inspired robot in comparative studies with real-life brittle stars, creating a feedback loop of information in which they can use the robot to better understand brittle stars, and then in turn improve the design of the robot.
“An untethered brittle star-inspired soft robot for closed-loop underwater locomotion” was presented at the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).