
An elegant solution to the soft sensing challenge
Carmel Majidi’s team has developed a soft magnetic skin with a single sensing element that detects force and contact.
From warehouses to hospitals, soft robots are used in different places to assist humans in moving items, treating patients, and gathering information. As interests in these robots keep growing, scientists are developing ways to give them the kind of sensing capabilities found in natural soft tissue.
However, this attempt brings ample challenges. Most types of tactile skin require a wire for every single location where people want to detect touch. The wires may eventually look like a large bird’s nest when it comes to sensing large areas.
To make matters worse, this complicated electrical interface may break the system. “The wires might be fine inside hard cases such as smartphones and other devices, but if you’re talking about fabric, skin, or something else that’s soft, then suddenly all those wires become sources of failure,” said Carmel Majidi, an associate professor of mechanical engineering at Carnegie Mellon University.
So how can we avoid this hassle? Majidi and Tess Hellebrekers from his Soft Machines Lab have developed an elegant solution: a soft magnetic skin with a single sensing element. Their findings were published in Advanced Intelligent Systems.
Source: College of Engineering
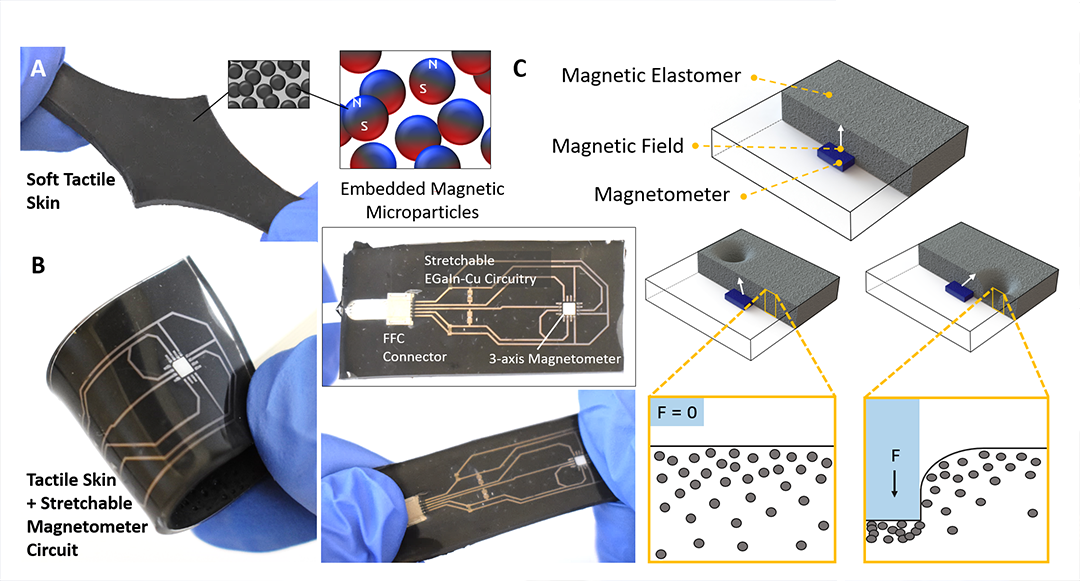
The components of the soft magnetic skin.
This soft skin is like a stretchy magnet that can be placed on robots, natural skin, or other materials to give them a sense of touch. It is composed of silicone rubber loaded with millions of microparticles. Each particle has a north pole and a south pole, which creates a magnetic field. When the material makes contact with another object, the rubber detects the move and all those microparticles will start moving around, thereby changing the internal magnetic field within the rubber.
These changes in the magnetic field will then be detected by the magnetometer, an electronic chip embedded in the magnetic skin. By measuring these changes, the magnetometer can infer the location and intensity of the contact. In other words, it can estimate where the touch is and how hard the touch is pressing on the material’s surface.
“I think force and contact are the two key interests for most skin sensing because our skin can do that too,” said Hellebrekers, who is a doctoral student in robotics.
What’s more, this skin doesn’t need to touch the material’s surface directly to sense contacts. “The nice thing about magnets is that they cut through the air,” said Majidi. “You don’t have to have a physical connection to sense that magnetic field.”
The nice thing about magnets is that they cut through the air. You don’t have to have a physical connection to sense that magnetic field.
Carmel Majidi, Associate Professor, Mechanical Engineering
Due to this attribute, the magnetic skin can be developed into a great tool for medicine. Scientists and doctors have become more interested in using soft robotics in medicine, especially in gastrointestinal (GI) endoscopy. Although they have made great progress, it’s still difficult to incorporate electronics and sensors because they tend to be very bulky and rigid, which will interfere with the endoscopes’ mobility.
And that’s precisely why Majidi’s team is excited about applying their new findings. “A material like this would potentially be a breakthrough in areas like robotic endoscopy where you want to introduce sensing functions but don’t want to use bulky electronics and a ton of wiring,” said Majidi.
To further enhance the magnetic skin, Majidi’s team will study how to detect force along cylinder-shaped objects, which are similar to catheter endoscopes. They also aim to expand the sensing areas of the skin. Currently, the magnetic skin can localize contact over a continuous 1.5 cm² area. The researchers are looking at ways of making the magnetic microparticles produce a larger magnetic field or placing the magnetometer in different locations.
Although their project is still in development, it opens a new door to soft robotics sensing. “I really like this system because we can measure the magnetic field without any electrical interface,” said Hellebrekers. “That gives us a lot more freedom in designing the kind of interface that is going to be much more easily integrated into different systems.”