
Sea slugs: what can we learn from them?
Studying Aplysia californica, or sea slugs, can tell us a lot about neuromuscular systems and open up avenues for more controlled animal experiments.
Aplysia californica, or more commonly, sea slugs, are a fascinating organism utilized in research. Because of their relatively small nervous system composed of large individual neurons, neuroscientists have been able to identify distinct named neurons and can measure their activity while the animal moves around. Of particular interest is the animal’s feeding structure, which allows the animal to interact with the environment.
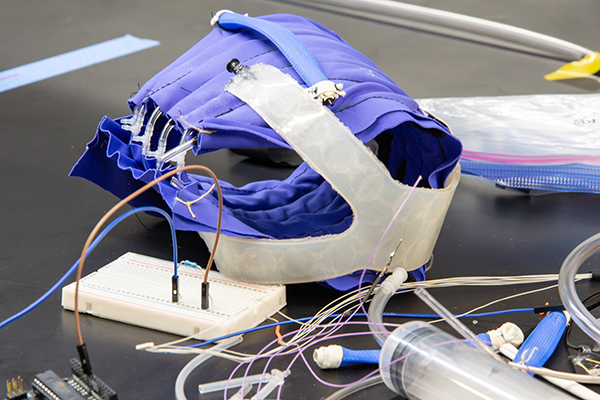
In collaboration with researchers at Case Western Reserve University, the CMU Biohybrid and Organic Robotics Group, led by Vickie Webster-Wood, is studying the sea slug feeding structure, both in robots and in simulation. This research is part of a multinational research collaboration studying neuromuscular systems with the support of the National Science Foundation NeuroNex Network.
“From a mechanical engineering standpoint, the system is fascinating because there are no bones—it’s just muscle attached to muscle,” said Webster-Wood, associate professor of mechanical engineering. “There’s a big gap in our understanding of the mechanics, the force capabilities, and the dynamics of individual muscles within the structure.


Out of the 10 to 12 identified muscle groups in the feeding structure, only one had a model so far. In their most recent collaborative work, now published in Biological Cybernetics, the CMU BORG collaborated with the Chiel lab at CWRU and focused on creating a model of the I3 muscle, which plays a key role in retraction of the grasper within the feeding apparatus.
Ravesh Sukhnandan, a Ph.D. student in Webster-Wood’s lab and first author of the paper, was responsible for most of the data fitting and analysis for the model. “This project was a great opportunity to dive deeper into the biology and function of muscle,” said Sukhnandan. “The knowledge gained from this project will help us to develop better computational models of Aplysia’s feeding behavior, as well as design more realistic Aplysia-inspired soft robots.”
Moving forward, the team hopes that their work will open up numerous possibilities for basic neuroscience research. Understanding the mechanics to establish a high-fidelity model of the sea slug feeding system will enable researchers to perform more controlled, targeted experiments. Additionally, as soft-body robots are becoming an increasingly promising field of study, Webster-Wood believes that learning about physical muscle will help in the design and mechanics of future soft robots.
On the longer horizons, my goal is to create sustainable, completely biocompatible, biodegradable robots.
Vickie Webster-Wood, Associate Professor, Mechanical Engineering
“On the longer horizons, my goal is to create sustainable, completely biocompatible, biodegradable robots,” said Webster-Wood. “So, the more we can understand about the neuromuscular systems in existing animals, the better we’ll be able to design biohybrid robots of our own.”
The team of researchers included Carnegie Mellon University’s Vickie Webster-Wood and Ravesh Sukhnandan; Case Western Reserve University’s Qianxue Chen, Jiayi Shen, Samantha Pao, Yu Huan, Gregory P. Sutton, and Hillel J. Chiel; and University of Lincoln’s Jeffrey P. Gill.