
Big steps for mini robots
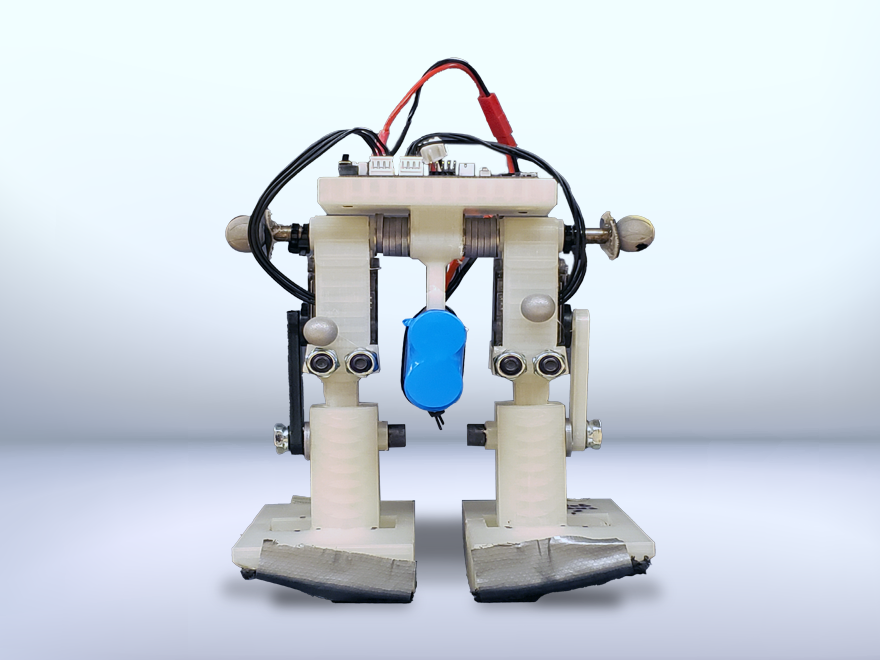
Aaron Johnson’s Robomechanics Lab tested spherical foot designs to find the best fit for their biped robot with 15-cm legs.
Sometimes walking isn’t as simple as one foot in front of the other, especially when building robots that walk on two legs. Aaron Johnson’s Robomechanics Lab, which aims to create robots that are suitable for field work, recently experimented with several foot designs to give a 15-centimeter biped the steady gait it would need to perform complex tasks. Their robot combines the mobility advantages of passive dynamics and the minimal hardware of actuators to form an easily constructed device that, despite its miniature build, could make a big difference in the future of areas like natural disaster recovery.
With legs that are 15 centimeters long, this biped is on the smaller side for a walking robot. However, by understanding the passive dynamics and using simple designs we can actually make something this small that walks. The simplicity of these designs—in this case, one torso, two upper legs with an actuated joint in each, and a passive hip joint—makes quasi-passive walkers an ideal candidate for conducting field work.
This robot carries its own battery and processor board and doesn’t need to be attached to anything else to walk. It just needs flat ground.
Justin Yim, CIFellows 2020 Postdoc, Mechanical Engineering
“The free walking is fully power autonomous, unsupported by structure or offboard electronics,” says Justin Yim, a postdoctoral researcher in the Robomechanics Lab who worked on the project with Johnson, an associate professor of mechanical engineering. “This robot carries its own battery and processor board, and doesn’t need to be attached to anything else to walk. It just needs flat ground.”
One of the most challenging parts of the design is the feet. Johnson and his team tested multiple spherical designs to determine which one would let the robot maintain its balance and stability. The team’s first choice would have been concentric feet with a gap, which look like a sphere with a wedge cut out of the middle. The biped landed on the edge of the foot instead of the surface as it walked, and its gait was unstable. A second option, concentric feet without a gap, comprised almost a full sphere. The team observed the biped roll from one foot to another while rocking from side to side; however, instability was still an issue. Non-concentric feet wound up being the most practical fit. In this design, the feet have a wider stance with a gap between them, and they land on the face instead of the edge as they walk.
Source: College of Engineering
Johnson’s team compared spherical foot designs on a bipedal robot with 15-cm legs to see which would improve its gait.
Yim compares this experiment to trying on shoes for a robot. Because the team stuck to spherical designs, it’s less of a debate over heels and flats, and more like a decision between different pairs of tennis shoes to see which ones offer enough support in the right places. A perfect fit for bipeds allows them to teeter as they walk, without losing their balance.
Choosing non-concentric gap feet as the best design marks a baby step towards understanding how smaller bipeds can be applied to more difficult tasks. Logical possibilities for miniature, legged robots include environmental monitoring or natural disaster recovery, particularly for investigating hard-to-reach crannies and crevices. The idea behind monitoring how bipeds walk with different types of feet is to establish what movements are easy and difficult to make. Understanding the physics of walking can shed light on how bipeds would perform in a variety of situations, and how feasibly their designs could be modified to accommodate payloads like sensors or cameras.
“This robot isn’t the most extreme in anything,” says Yim. “I think in combination it’s a unique space. There have been other walkers that use fewer motors, but they weren’t freely walking, they were attached to a boom. Ours isn’t the smallest walker ever, but it does use these passive dynamic-inspired walking techniques that are not as common in the smallest scales.”