Enabling safe and efficient dual arm manipulation is one critical step toward versatile and generalist robotic systems. With dual arm manipulation, robotic systems can achieve human-level task handling as well as better assist humans.
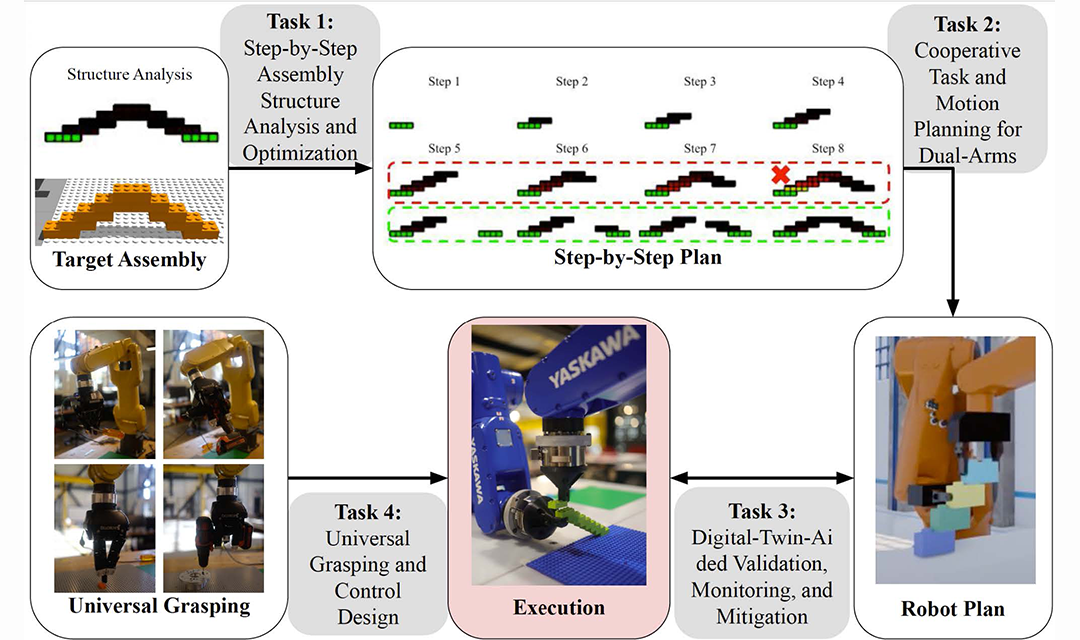
In this project, researchers are using the Yaskawa GP4 robots in the Mill 19 assembly testbed to perform Lego assembly as the robotic task. They are developing an efficient combinatorial optimization-based algorithm to generate a detailed assembly plan that ensures assembly feasibility for all intermediate steps. In particular, the step-by-step instruction includes which component to be assembled, what tool to use, and a heatmap describing the stress of the intermediate structure.
This builds on multi-agent path finding (MAPF) and combined multi-agent task and path finding (TAPF), which have demonstrated success in coordinating large teams of mobile robots. The project includes the development of a synchronous digital twin for Yaskawa GP4 to verify the planned dual-arm motion before deployment and monitors the real-time execution. To further improve the capability of the digital twin, researchers will also build a fully synchronous digital twin that not only includes synchronized robots, but also synchronized environment (i.e., synchronized environmental objects, such as Lego bricks, assembly components, moving humans, etc). This presents an integrated hardware-software solution to address universal grasping and control to allow robots to work on assembly tasks that require specialties as well as improve the flexibility of robot manipulation capabilities so that they can perform on different tasks easily.