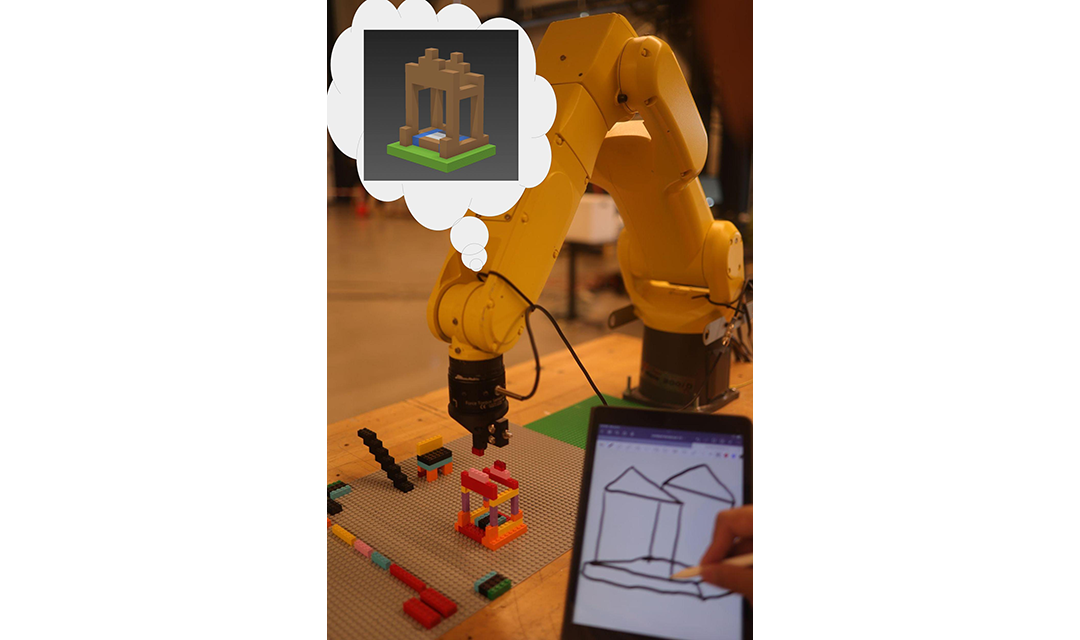
Researchers will develop robotic assembly and disassembly processes for Lego blocks along with a synthesized digital twin by designing end-of-arm tooling components for the robot. They will also develop generative and execute task planning modules to assemble the Legos based on either a digital image or text description, allowing automatic planning of the assembly and disassembly processes.