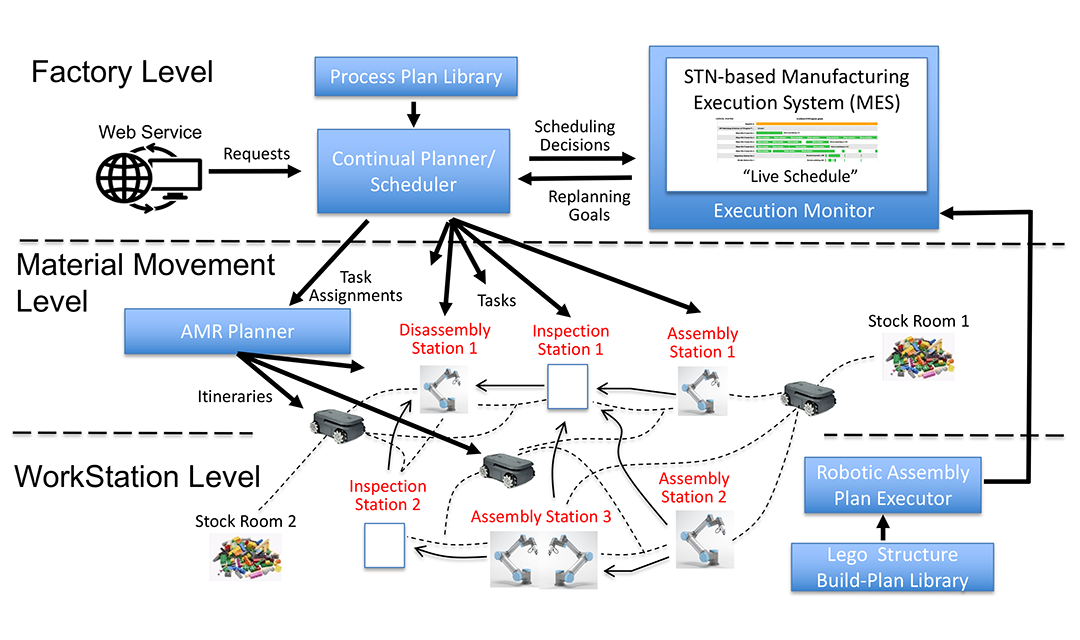
Researchers will develop the component techniques to implement an integrated, multi-level system for task allocation and autonomous mobile robot (AMR) planning and control of a robotic Lego assembly/disassembly test bed at Mill 19 to be used to demonstrate advanced manufacturing capabilities.