Project status: completed
In our vision, next-generation manufacturing robots will use the sense of touch to actively explore their environments using tactile feedback for a safer and more efficient future manufacturing. Funded by MFI, this project created a miniature, low-cost tactile sensor and bio-inspired vibrotactile sensing strategy, which can be modularly integrated into any robotic end effector or End of arm tooling (EOAT) to enable high dynamic range contact sensing for force/torque and material property estimation applications.
The main contributions of this work are:
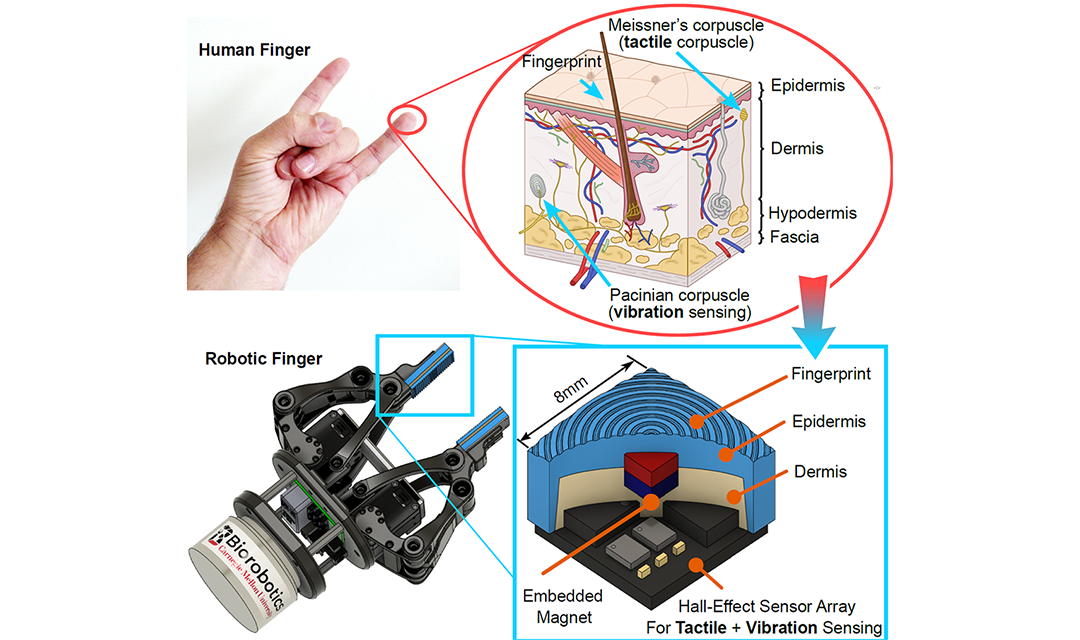
- Learning from nature by applying bio-inspired philosophy to create a human-finger-like superficial fingerprint ridges and dual stiffness elastomers structure, which provide robotic vibrotactile sensing that enable non-visual based material classification
- Demonstrating a working sensor prototype that can be mass-produced with low cost (less than or equal to $10 per unit cost at 1k quantity)
- Designing and fabricating reference robotic grippers to examine the feasibility of integrating the proposed sensor hardware for tactile-based manipulation tasks, such as skillful pick-n-place of delicate and deformable objects during manufacturing and de-manufacturing (recycling) processes.
This CMU MFI tactile sensor could be implemented in the future for robotic tasks such as contact detection, stiffness mapping, material handling, and object recognition. It not only not only can be used in the manufacturing field, but also has a potential impact in health care, agriculture, search and rescue, and even space exploration applications.
Details of the work can be found in the following papers:
- “A Tunable Magnet-based Tactile Sensor Framework” from the IEEE SENSORS 2020 conference
- “Design of a Biomimetic Tactile Sensor for Material Classification” which received the “Outstanding Mechanisms and Design Paper” award from the IEEE ICRA 2022 conference.
Pictured above: CMU MFI tactile sensor is inspired by the human fingertip's layered tissue structure, which allows the robot to perceive the world through the sense of touch. Taking inspiration from human fingertips, we present the design, fabrication, and characterization of a low-cost tactile sensor. Our sensor mimics the layered tissue structure in finger pads, including the dermis, epidermis, and fingerprint. An embedded neodymium magnet and Hall-effect sensor array mimic the function of sensory corpuscles within human fingers. This sensor design is low-cost and customizable, which makes them well-suited for a wide range of tactile sensing applications in robotics. Human hand (Cherus, CC-BY-SA-3.0) and skin structure (Nefronus, CC-BY-SA-4.0) adapted from Wikimedia Commons.