Grinding out a solution
Lynn Shea
Mar 20, 2025
When Changliu Liu came to Carnegie Mellon University in 2019, she brought with her a keen ability to apply mathematical models to robotic control systems along with valuable industry contacts at Siemens USA, who she had worked with as a doctoral student at the University of California, Berkeley.
The assistant professor at the Robotics Institute and director of Carnegie Mellon’s Intelligent Control Lab was not particularly focused on solving manufacturing problems at that time. But her ability to develop and integrate an array of difficult technical robotic innovations has led to a breakthrough that enhances the accuracy, speed, and reliability of an important industrial robot application.
By joining forces with Carnegie Mellon’s Manufacturing Futures Institute, the ARM (Advanced Robotics for Manufacturing) Institute, new contacts from Siemens Energy, and one of the world's largest manufacturers of robotic automation systems—Yaskawa; her research team was able to complete a successful project to develop a robotic system that automates the internal grinding and polishing process of a large piece of ductwork for a Siemens Energy combustion turbine.
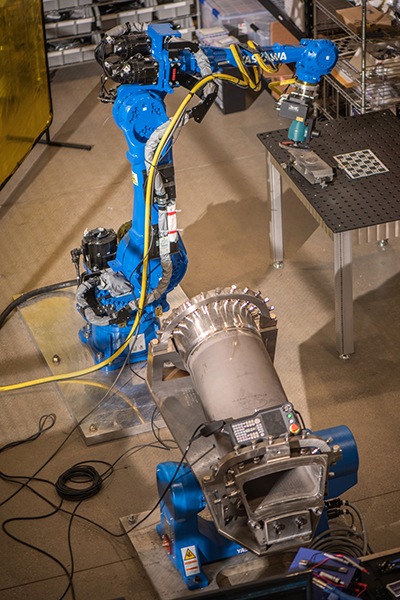


Together, the partners have solved a complex problem that has been a challenge for large international corporations, as well as small local companies. Polishing and grinding play a crucial role in ensuring the durability and functionality of metallic components in various industries. But the process is time consuming, expensive, and can also be a safety hazard for the highly skilled welders who must otherwise use multiple hand-held devices—oftentimes in confined, difficult to access spaces.
But developing an automated robotic system to handle the challenging task of accurately grinding and polishing nonlinear and nonconvex surfaces demands an advanced system composed of integrated components.
Unlike conventional robotic grinding and polishing solutions, which are limited to smaller workpieces and require manual reconfiguration, our system is highly adaptable and capable of handling varying geometries autonomously.
Changliu Liu, Assistant Professor at the Robotics Institute and director of Carnegie Mellon’s Intelligent Control Lab
“Unlike conventional robotic grinding and polishing solutions, which are limited to smaller workpieces and require manual reconfiguration, our system is highly adaptable and capable of handling varying geometries autonomously,” explained Liu.
In the first phase of the project, which was Liu’s first undertaking at Carnegie Mellon, preliminary work began on all five of those components, which included laser calibration to ensure precision alignment of the robotic system; tool calibration that could optimize the interaction between the robot and polishing tools; surface measurement to provide accurate detection of weld beads and surface features; path generation that enables adaptive and efficient trajectory planning; and compliance control to ensure consistent pressure and smooth planing.
Then, in 2022, when the ARM Institute was pursuing a Department of Defense call for a multi-institute project, they saw an opportunity to work with CMU, Siemens, and Yaskawa to further advance Liu’s project. And in April of 2024, the partners came together for a demonstration of their final product.
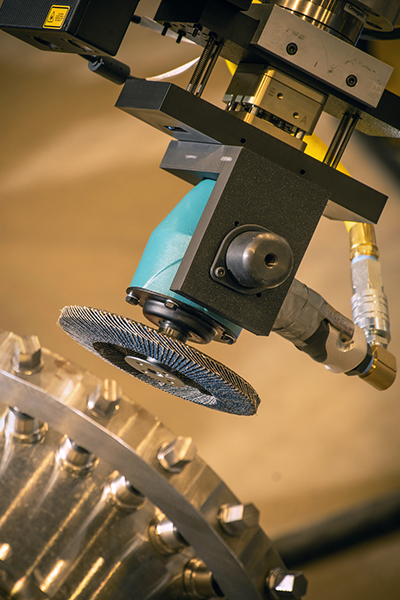
The CMU team put together the combination of visual inspection and robot guidance as well as fore sensing so it can adaptively locate a part, find the weld beads, and grind it without any human intervention.
Roger Christian, Division Leader, New Business Development, Yaskawa America’s Motoman Robotics Division
“The CMU team put together the combination of visual inspection and robot guidance, as well as force sensing so it can adaptively locate a part, find the weld beads, and grind it without any human intervention,” explained Roger Christian, division leader of new business development at Yaskawa America’s Motoman Robotics Division.
In addition to finding a way to grind down weld beads inside the large duct, their system can also be transitioned onto any aircraft assembly such as a nose cone or a wing.
“On the flip side, there’s also a really strong industrial need for this technology,” explained Christopher Adams, an Operations Manager with the ARM Institute.
This initiative not only addressed a critical industry challenge but also laid the foundation for a new robotics start-up, Instinct Robotics. The company, which offers end-to-end, general-purpose robotics solution optimized for high-mix, low-volume manufacturing, has the potential to help solve U.S. workforce shortage and labor churn by bringing new levels of automation to casting, grinding, welding, polishing, and coating processes.
For the young researcher, the project has had another incredible benefit.
“The most important part of this partnership is that it helped us, as researchers in academic institutions, understand the real-world challenges and learn how to solve them.
For media inquiries, please contact Lynn Shea at slynn@cmu.edu.