Research in the CMU B.O.R.G. focuses on the study and application of biologically derived tissues to create sustainable, biocompatible robotic systems. By studying existing tissues (such as skeletal muscle or neural circuits), we seek to identify design guidelines for bio-inspired and biohybrid robots. We can also use tissues, or cells isolated from these tissues, to grow novel organic systems in order to build biocompatible robots seeking to capture the compliance, behavioral flexibility, and force-to-weight ratios seen in living organisms. Finally, we are interested in the use of plant and protein-derived materials in the creation of sustainable, biodegradable, and even edible robots.
Research project outcomes
- Collaborative Research: FRR: Adaptive mechanics, learning and intelligent control improve soft robotic grasping(NSF – 2138923)
- CAREER: Adaptive Actuation and Control in Embodied Biohybrid Robots (NSF - 2044785)
- NeuroNex: Communication, Coordination, and Control in Neuromechanical Systems (C3NS) (NSF - 2015317)
- ARO SSyMBioTIC Biohybrid MURI
- Data-Driven Morphological Growth and Material Transport Regulation for Biological Neural Circuits Design and Prediction (NSF - 2332084)
Highlights playlist
Projects
Organic structures
In living organisms, both plant and animal, bio-compatible materials and proteins make up the structures that support and guide the function of surrounding cells and tissues. The CMU B.O.R.G. uses a variety of bio-fabrication techniques, including additive manufacturing and electrocompaction, to build protein and mineral based structures for robotic systems. Such structures are characterized via mechanical testing and mechanical properties are optimized to support the function of specific cell or to ensure specified degradation speeds in natural environments.
Muscle-based actuators
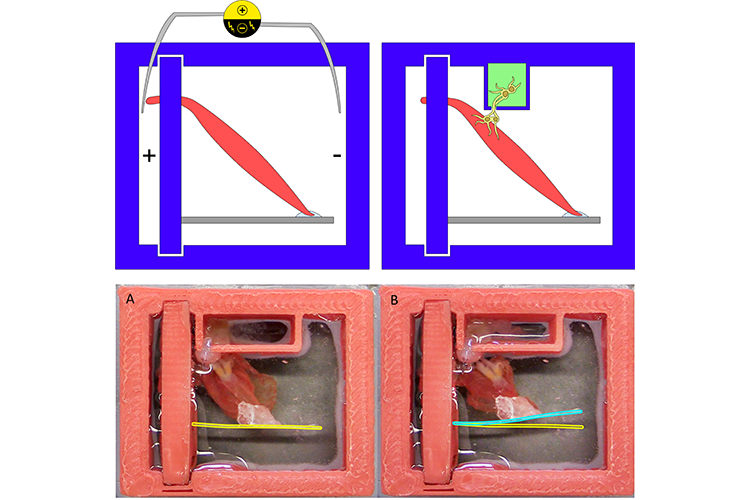
Muscle provides many of the functional properties often sought after in robotic applications, including natural compliance, energy efficiency, and high force-to-weight ratios. Research in the CMU B.O.R.G. focuses on how to fabricate and support functional muscle tissues that mimic the structure of native muscle in living systems, how different stimulation techniques affect muscle performance, and on creating computationally efficient neuromuscular models for in silico robot design. Our group studies mammalian and avian muscles as well as invertebrate muscles in order to create muscle-based actuators suitable for a wide range of environments.
Non-muscle biologically derived
material-based actuators
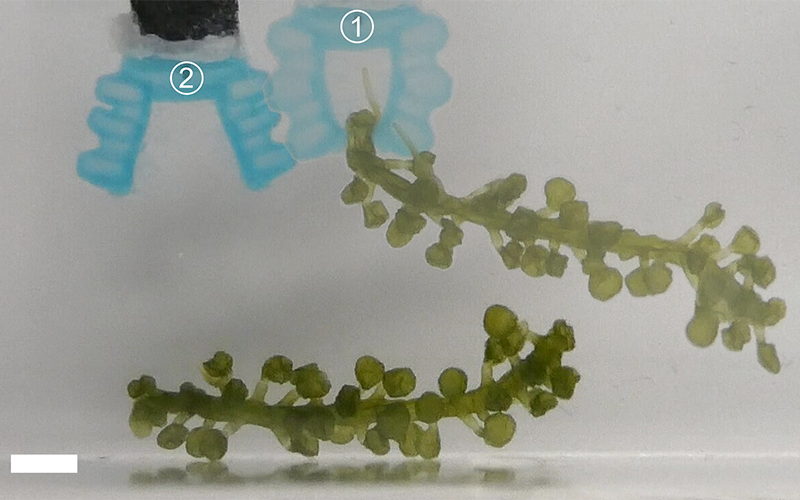
In addition to studying muscle as a robotic actuator, our group is interested in how plant and algae-derived materials can be used in the fabrication of biodegradable, and even edible soft robotic actuators. Using algae-derived bioinks and 3D bioprinting, we are creating new soft robotic components that can be made from materials native to the desired deployment environment.
Organic sensors
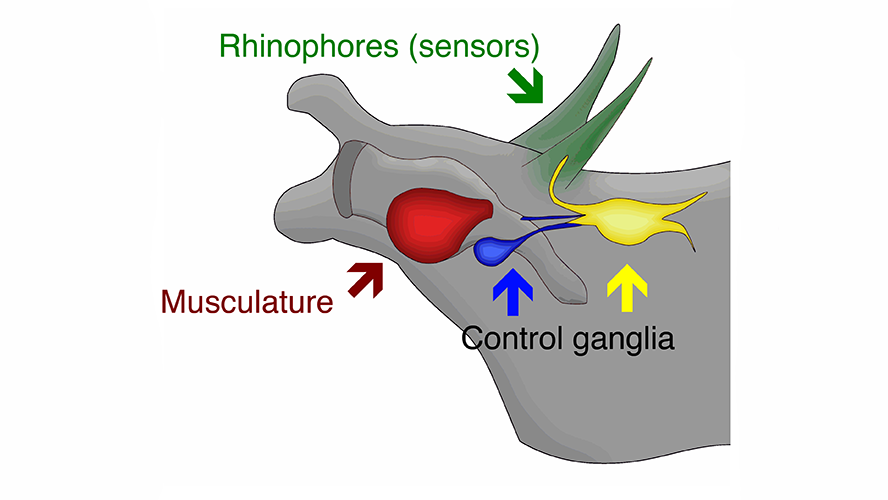
The sensory systems of living organisms demonstrate amazing specificity and resolution. The CMU B.O.R.G. studies and simulates how the structure and cellular organization of such sensory systems affect cell signaling and how those signals are integrated and processed by the associated neural circuitry. Current research in this thrust focuses on invertebrate sensory systems for aquatic applications.
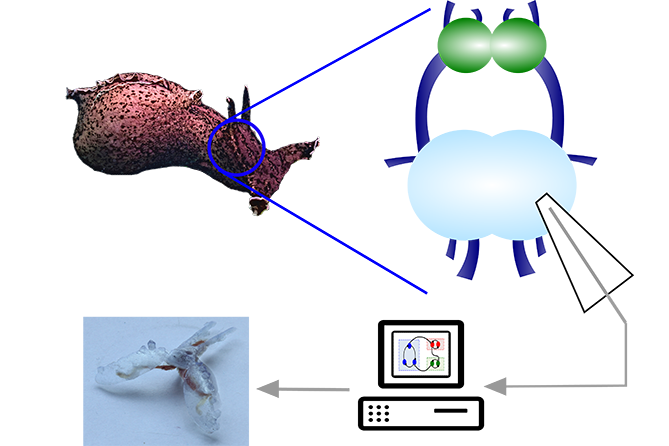
Organic controllers
Even relatively “simple” animal nervous systems are capable of robust sensory integration, signal processing, motor control, and complex behavioral flexibility, allowing animals to survive and flourish in complex, dynamically changing environments. Such properties and capabilities are a major goal in robotic control research. The CMU B.O.R.G. studies sensory integration and motor control in invertebrate neural circuits to better understand learning and control with a goal of creating programmed control circuits composed of living neurons for use in organic robots.

Bio-inspired robotics
In addition to using living materials to build robotic devices, the CMU B.O.R.G. engages in traditional robotics research and development. We apply principles learned from our studies of the tissues, as well as relevant literature from biology and neuroscience, to create bio-inspired robotic devices and controllers. Our current research projects focus on bio-inspired control algorithms based on invertebrate neural circuits and biologically inspired swimmers.
Biohybrid and organic robotics
In addition to specific research on individual organic systems, researchers in the CMU B.O.R.G. are currently integrating organic and synthetic materials to create Biohybrid and even completely organic robots. The systems combine bio-inspired robotics, bio-fabrication, additive manufacturing, and simulation to create and test biocompatible robots. Our current research focuses on devices that are capable of crawling or swimming in aquatic environments.