Handling soft, fragile, or slippery objects such as ripe fruit remains a challenge in robotics. Soft robotic graspers show tremendous promise in safely handling such objects without damaging them. Furthermore, creating software to control soft robots poses an additional challenge. In contrast, many animals with soft bodies solve this problem every day as they forage and feed. Not only are they able to grasp and manipulate soft and fragile objects, but animals can also learn how to safely interact with new objects and vary how much force they apply during grasping based on their prior experience. This project will create a mechanism that can learn how to safely grasp a wide range of objects, including fragile foods like tomatoes and mushrooms. The ability of a robot to learn how to safely handle soft and fragile objects will have future applications in agriculture, manufacturing, and medicine.
Funding Agency: NSF - Foundational Research in Robotics Program
Project Period: 2/2022 - 1/2025
Abstract Page: NSF-2138923
CMU research team

Victoria Webster-Wood
Associate Professor
Mechanical Engineering
Courtesy appointments
Biomedical Engineering, Robotics Institute

Michael Bennington
Doctorate
Kevin Dai 2023
Doctorate

Ravesh Sukhnandan
Doctorate
CWRU research team

Roger Quinn
Faculty

Hillel Chiel
Faculty

Yanjun Li
Doctorate
Research highlights
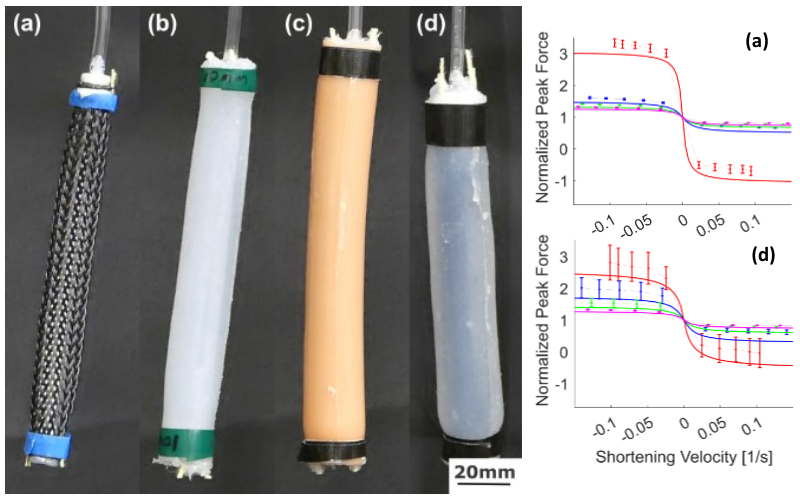
Design and Characterization of Viscoelastic McKibben Actuators with Tunable Force-Velocity Curves
McKibben actuators are commonly studied mechanical models of biological muscle, but lack many of the velocity-dependent properties of biological tissues. In this work, we design and characterize McKibben actuators modified with various viscoelastic material sleeves. By tuning the relative stiffness and time constants of the materials, we can modulate the dynamic response of the actuators.
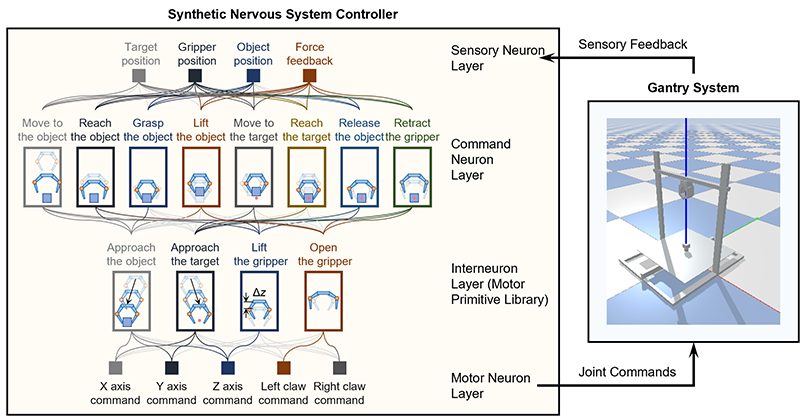
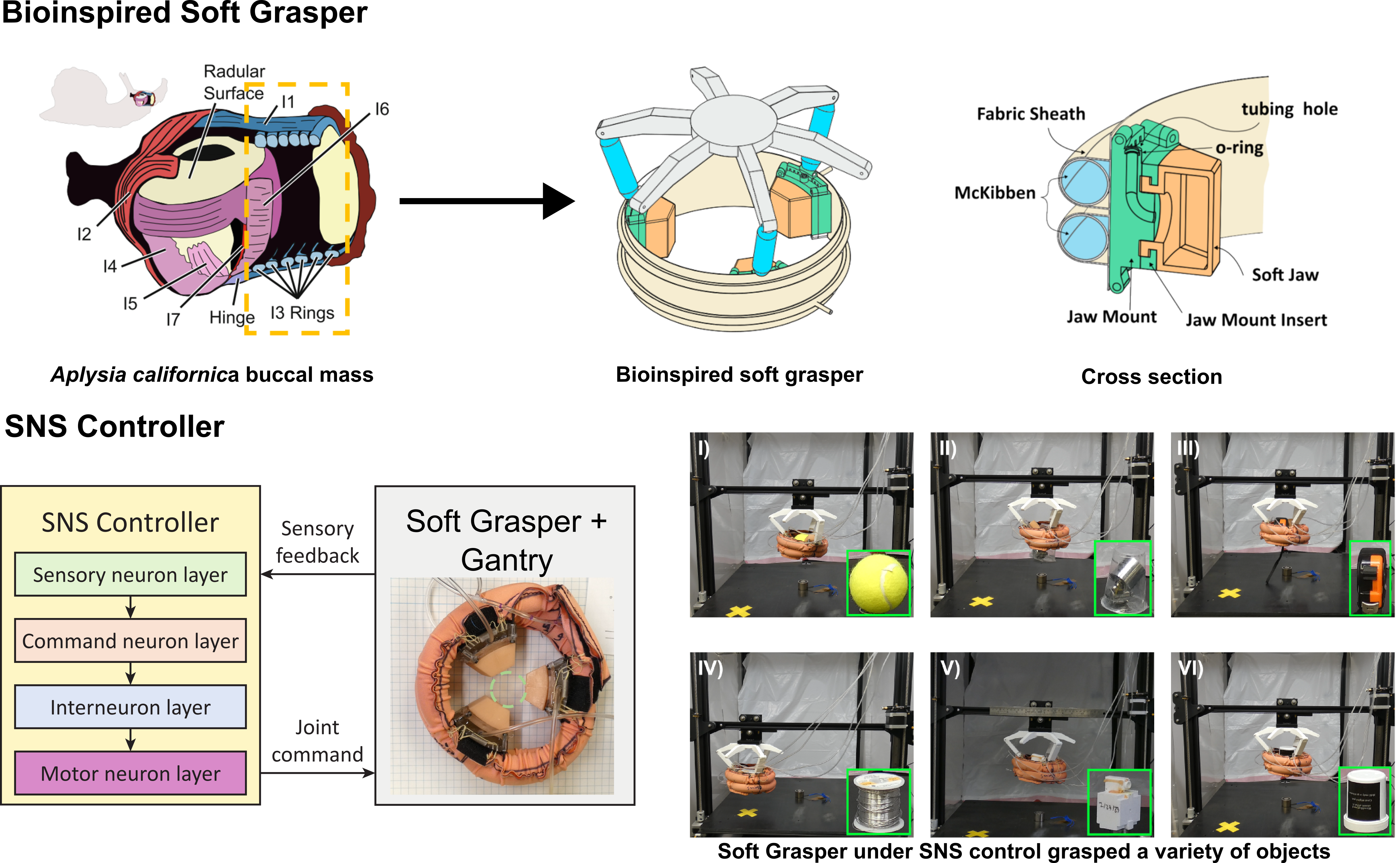
A Bioinspired Synthetic Nervous System Controller for Pick-and-Place Manipulation
We take inspiration from both the morphology and neural controller of Aplysia californica to create a soft grasper system controlled by a Synthetic Nervous System (SNS) controller. We demonstrate that the SNS controlled soft grasper is capable of grasping a variety of everyday objects with little additional tuning of the controller trained in a simulation environment.
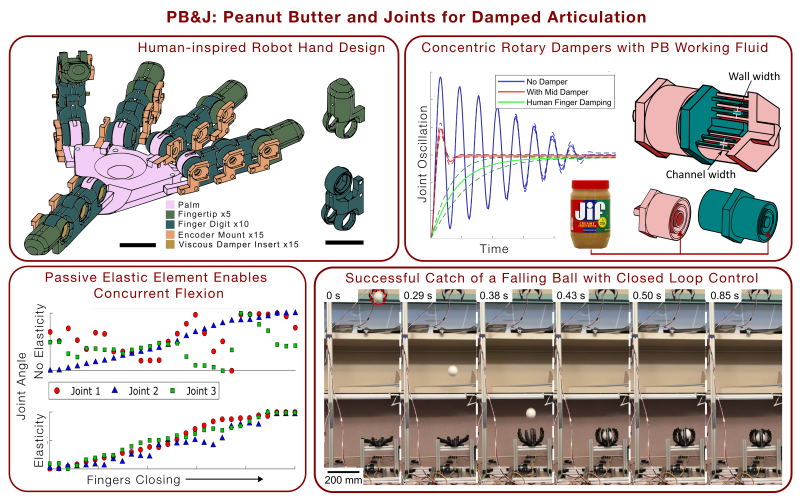
Peanut Butter and Joints for Damped Articulation
To enable researchers to explore the effects of joint viscoelasticity in joint control, we developed a human-hand-inspired grasping robot with viscoelastic structures that utilizes accessible and bioderived materials to reduce the economic and environmental impact of prototyping novel robotic systems. We demonstrate that an elastic element at the finger joints is necessary to achieve concurrent flexion, which enables secure grasping of spherical objects.
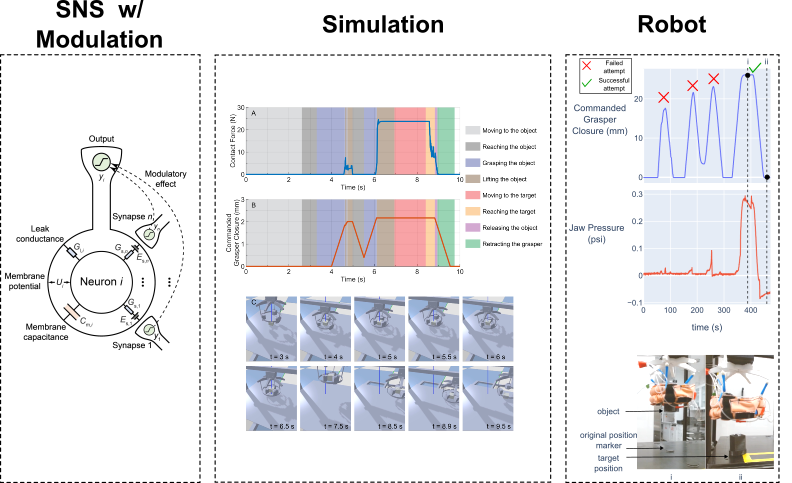
Modulation and Time-history-dependent Adaptation Improves the Pick-and-Place Control of a Bioinspired Soft Grasper
We introduce neuromodulatory mechanisms to our Synthetic Nervous System (SNS) controller to mimic similar mechanisms seen in Aplysia californica’s I1/I3 musculature. We show that we can exploit this mechanism for resilient pick-and-place on the real soft robot grasper system, where it can command the grasper to increase its squeezing force to lift heavy objects after having failed previously.
Synthetic Nervous System Control of a Bioinspired Soft Grasper for Pick-and-Place Manipulation
Synthetic nervous systems (SNSs) include real neural dynamics which we demonstrate can more efficiently learn non-linear computations. We then demonstrate the applicability of the SNS and machine learning techniques to train the SNS for pick-and-place robotic manipulation.