
Mobility
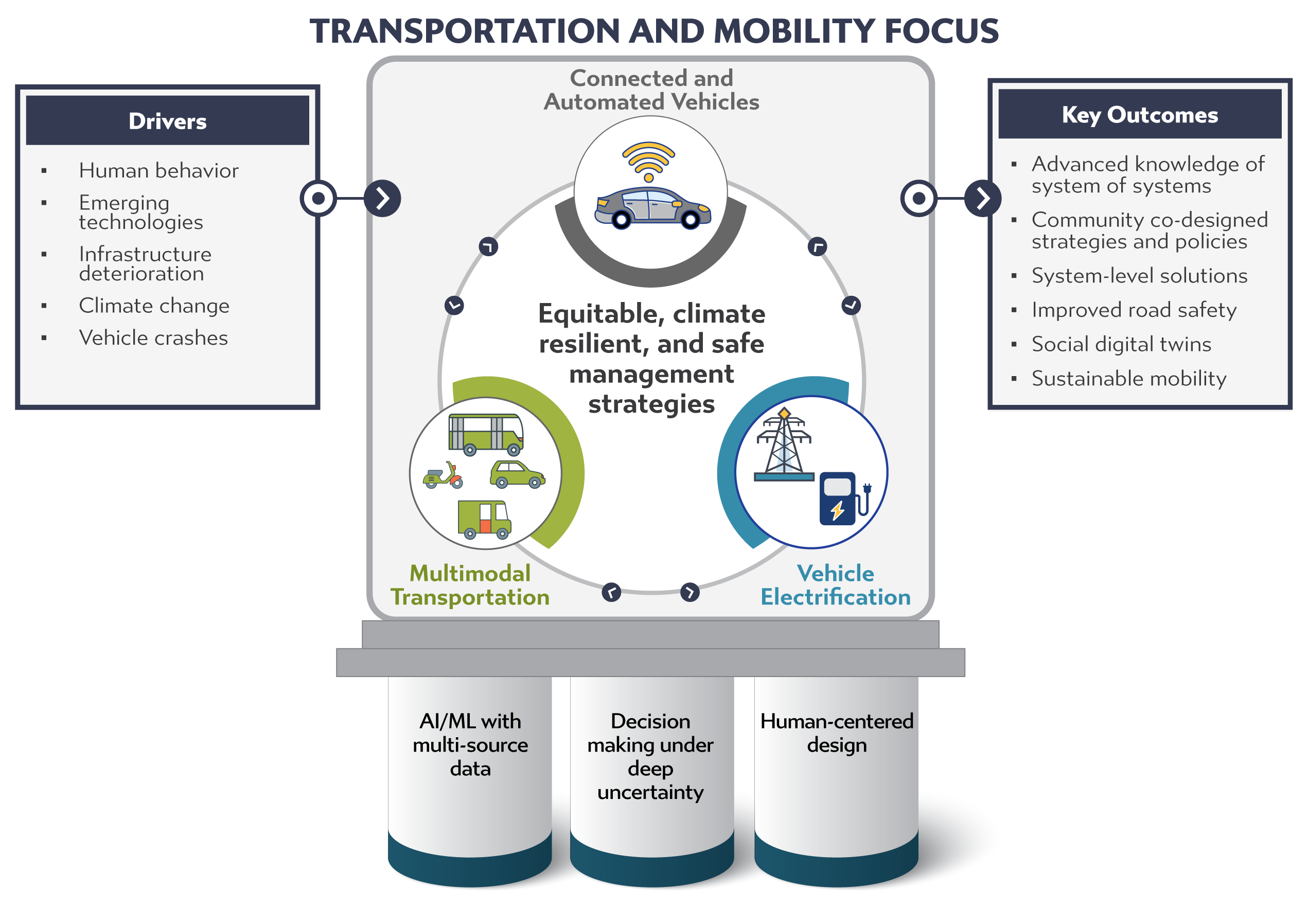
Mobility and transportation focus
Example projects

Equitable transit development
This study develops a framework to evaluate the impact of transit-oriented development projects on low-income residents. The goal is to ensure these projects benefit vulnerable communities and promote equitable outcomes. The research aims to provide a model for assessing and improving transit development nationwide.
Faculty advisors: Burcu Akinci and Corey Harper

Enhancing safety and sustainability in heavy-duty vehicles
Heavy-duty vehicles are responsible for a disproportionate share of fatal accidents and carbon emissions in the transportation system. This research focuses on creating a digital twin framework that integrates real-time data and telematics to model the physical and operational dynamics of heavy-duty vehicles, continuously monitoring vehicle behavior, predicting potential safety risks, and suggesting interventions to prevent crashes. The system provides transparent, data-driven insights for fleet managers, helping optimize vehicle operations, enhance safety, and reduce emissions, while informing regulatory standards and policy decisions.
Faculty advisor: Pingbo Tang

Developing Tools for Ensuring Fair EV Access in Urban America
As cities accelerate the transition to electric vehicles (EVs), equitable access to charging infrastructure remains a critical challenge. This project develops a bi-objective optimization model to explore how prioritizing equity affects the distribution of EV charging stations in different cities in the US. This research highlights that fair and widespread EV adoption depends not just on technology, but on intentional planning that is designed to ensure everyone can participate in a clean transportation future.
Faculty advisors: Corey Harper and Destenie Nock